
We start by importing the necessary Python packages.
import numpy as np
# Import local plotting functions and in-notebook display functions
import matplotlib.pyplot as plt
%matplotlib inline
Cellular Automata¶
Cellular automata are systems where all physical laws and fields are discretized: space is a lattice, time is discrete, and quantities like mass or spin are quantized. In these purely discrete universes, all physical laws take the form of IF-THEN statements.
The physical laws encoding the IF-THEN statements are called update rules. These rules are applied to each lattice site, and the result is a new state for the entire lattice. Typically, the update rules are local, meaning that the new state of a lattice site depends only on the state of the lattice site and its neighbors. Additionally, the update rules are synchronous, meaning that all sites are updated simultaneously. Basic cellular automata are usually also Markovian, meaning that the field values at the current time determine the field values at the next time, and so long-term memory does not exist outside of the current state of the system.
The Game of Life¶
Conway’s Game of Life is a cellular automaton that was first introduced in 1970 by the mathematician John Conway. It is a simple yet powerful model that demonstrates the emergence of complex patterns from simple rules. The Game of Life is a Markovian, local, and synchronous cellular automaton. The update rule depends only on the nearest neighbors of each lattice site, and the field variable has only two possible values, 0 (dead) or 1 (alive). The rules are as follows:
Underpopulation: Any live cell with fewer than two live neighbours dies ()
Survival: Any live cell with two or three live neighbours lives stays alive ()
Overpopulation: Any live cell with more than three live neighbours dies ()
Reproduction: Any dead cell with exactly three live neighbours becomes a live cell ()
These simple rules give rise to surprisingly complex behaviors; in fact, the Game of Life has been shown to support universal computation, given a suitable encoding scheme based on initial conditions. Below shows some examples of fixed-point, limit-cycle, and soliton like dynamics.


Images from Scholarpedia
Implementing Cellular Automata using inheritance in Python¶
Because the Game of Life represents a specific case of the more general class of cellular automata, we will start by defining a “base” class for cellular automata, CellularAutomaton, and then define subclasses for various specific automata rulesets. The base class handles state counting, initialization, and will contain a simulate method for the simulation loop (where we repeatedly call the update rule).
In the base class, we will define a next_state method because the simulate method depends on it. But because the state rule is different for each automaton, we will leave the implementation of next_state to be overwritten by the subclasses (the base class raises an exception)
This convention is an example of the Template Method Pattern in software development.
# A base allows us to impose structure on specific cases. We will use this as a parent
# for subsequent classes
class CellularAutomaton:
"""
A base class for cellular automata. Subclasses must implement the step method.
Parameters
n (int): The number of cells in the system
n_states (int): The number of states in the system
random_state (None or int): The seed for the random number generator. If None,
the random number generator is not seeded.
initial_state (None or array): The initial state of the system. If None, a
random initial state is used.
"""
def __init__(self, n, n_states, random_state=None, initial_state=None):
self.n_states = n_states
self.n = n
self.random_state = random_state
np.random.seed(random_state)
## The universe is a 2D array of integers
if initial_state is None:
self.initial_state = np.random.choice(self.n_states, size=(self.n, self.n))
else:
self.initial_state = initial_state
self.state = self.initial_state
self.history = [self.state]
def next_state(self):
"""
Output the next state of the entire board
"""
raise NotImplementedError
def simulate(self, n_steps):
"""
Iterate the dynamics for n_steps, and return the results as an array
"""
for i in range(n_steps):
self.state = self.next_state()
self.history.append(self.state)
return self.stateWe can now check that our base class works as expected by instantiating a specific case of it.
ca = CellularAutomaton(10, 2, random_state=0)
print(f"Initialized a cellular automaton with {ca.n} cells and {ca.n_states} states")
plt.figure(figsize=(4, 4))
plt.imshow(ca.initial_state)Initialized a cellular automaton with 10 cells and 2 states
However, the base class itself does not function, because the next_state method is not implemented.
ca.simulate(10)---------------------------------------------------------------------------
NotImplementedError Traceback (most recent call last)
Cell In[34], line 1
----> 1 ca.simulate(10)
Cell In[4], line 43, in CellularAutomaton.simulate(self, n_steps)
39 """
40 Iterate the dynamics for n_steps, and return the results as an array
41 """
42 for i in range(n_steps):
---> 43 self.state = self.next_state()
44 self.history.append(self.state)
45 return self.state
Cell In[4], line 36, in CellularAutomaton.next_state(self)
32 def next_state(self):
33 """
34 Output the next state of the entire board
35 """
---> 36 raise NotImplementedError
NotImplementedError: Before implementing the Game of Life, we will start by defining two simpler automata as subclasses of the base class. The ExtinctionAutomaton sends every single input condition to the same output state (0), while the RandomAutomaton assigns each input state to either 0 or 1 randomly.
class ExtinctionAutomaton(CellularAutomaton):
"""
A cellular automaton that simulates the extinction of a species.
"""
def __init__(self, n, **kwargs):
super().__init__(n, 2, **kwargs)
def next_state(self):
"""
Output the next state of the entire board
"""
next_state = np.zeros_like(self.state)
return next_state
class RandomAutomaton(CellularAutomaton):
"""
A cellular automaton with random updates
"""
def __init__(self, n, random_state=None, **kwargs):
np.random.seed(random_state)
super().__init__(n, 2, **kwargs)
self.random_state = random_state
def next_state(self):
"""
Output the next state of the entire board
"""
next_state = np.random.choice(self.n_states, size=(self.n, self.n))
return next_stateLet’s try running these automata, to see how they work
model = ExtinctionAutomaton(40, random_state=0)
model.simulate(200)
plt.figure()
plt.subplot(1, 2, 1)
plt.imshow(model.initial_state, cmap="gray")
plt.title("Initial state")
plt.subplot(1, 2, 2)
plt.imshow(model.state, cmap="gray")
plt.title("Final state")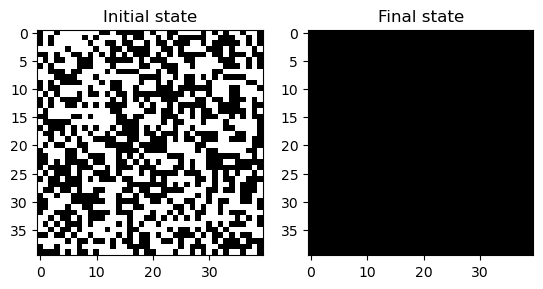
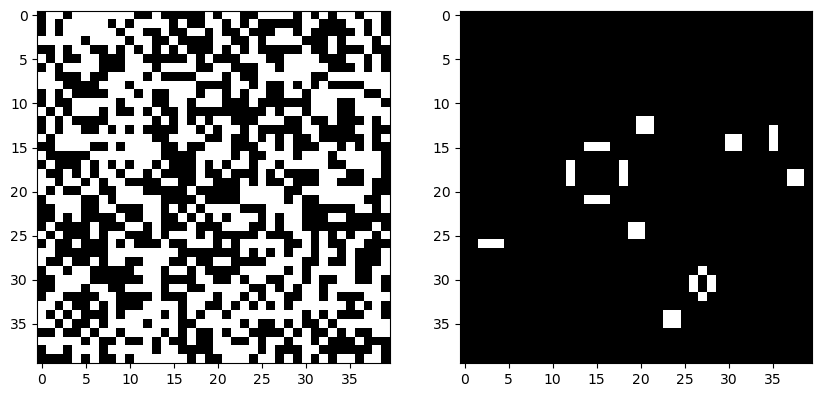
model = RandomAutomaton(40, random_state=0) ## Check random seed handling
model.simulate(200)
plt.figure()
plt.subplot(1, 2, 1)
plt.imshow(model.initial_state, cmap="gray")
plt.title("Initial state")
plt.subplot(1, 2, 2)
plt.imshow(model.state, cmap="gray")
plt.title("Final state")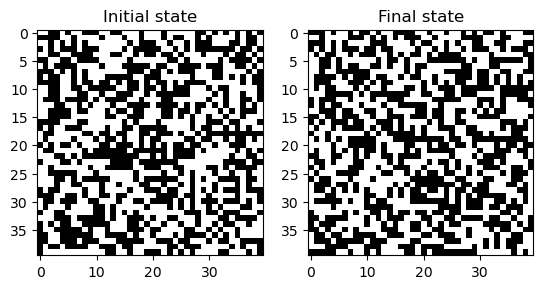
We are now ready to define the Game of Life as a subclass of the base class. In order to implement next_state, we will need to count the number of neighbors of each cell. We will do this by implementing three nested loops. The two outer loops will iterate over all the cells in the lattice, and the inner loop will iterate over the neighbors of the current cell. After counting the neighbors, we will apply the rules of the Game of Life to determine the next state of the cell.
For the innermost neighbor loop, we will use striding centered at the current cell position to extract the 3x3 neighborhood of the current cell. We don’t need to explicitly handle boundary conditions, because the negative strides will automatically pull the values from the other side of the array, resulting in periodic boundary conditions.
After finding the neighbors, their sum is computed in order to find the number of live () neighbors, and the rules of the Game of Life are applied to determine the next state of the current cell:
Underpopulation: Any live cell with fewer than two live neighbours dies
Survival: Any live cell with two or three live neighbours lives stays alive
Overpopulation: Any live cell with more than three live neighbours dies
Reproduction: Any dead cell with exactly three live neighbours becomes a live cell
# This child class inherits methods from the parent class
class GameOfLife(CellularAutomaton):
"""
An implementation of Conway's Game of Life in Python
Args:
n (int): The number of cells in the system
**kwargs: Additional keyword arguments passed to the base CellularAutomaton class
"""
def __init__(self, n, **kwargs):
# the super method calls the parent class's __init__ method and passes the
# arguments to it.
super().__init__(n, 2, **kwargs)
def next_state(self):
"""
Compute the next state of the lattice
"""
# Compute the next state
next_state = np.zeros_like(self.state) # preallocate the next state
for i in range(self.n):
for j in range(self.n):
# Count the number of neighbors. Subtracting the center cell
# ensures that we don't count the cell itself.
n_neighbors = np.sum(
self.state[i - 1:i + 2, j - 1:j + 2]
) - self.state[i, j]
# Update the next state using the rules of the Game of Life
if self.state[i, j] == 1:
if n_neighbors in [2, 3]:
next_state[i, j] = 1
else:
next_state[i, j] = 0
else:
if n_neighbors == 3:
next_state[i, j] = 1
else:
next_state[i, j] = 0
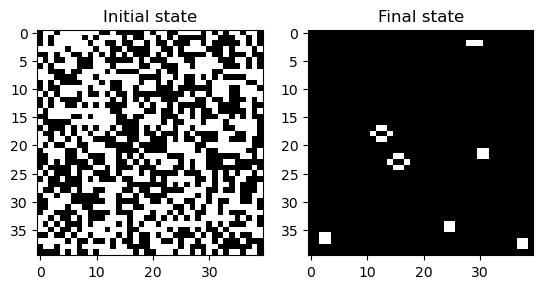
return next_stateWe can now run this automaton and see how it behaves. We will also try using the timing utility to see how long it takes to run the simulation for one step.
model = GameOfLife(40, random_state=0)
model.simulate(500)
# print timing results
print("Average time per iteration: ", end="")
%timeit model.next_state()
plt.figure()
plt.subplot(1, 2, 1)
plt.imshow(model.initial_state, cmap="gray")
plt.title("Initial state")
plt.subplot(1, 2, 2)
plt.imshow(model.state, cmap="gray")
plt.title("Final state")Average time per iteration: 2.38 ms ± 4.87 μs per loop (mean ± std. dev. of 7 runs, 100 loops each)
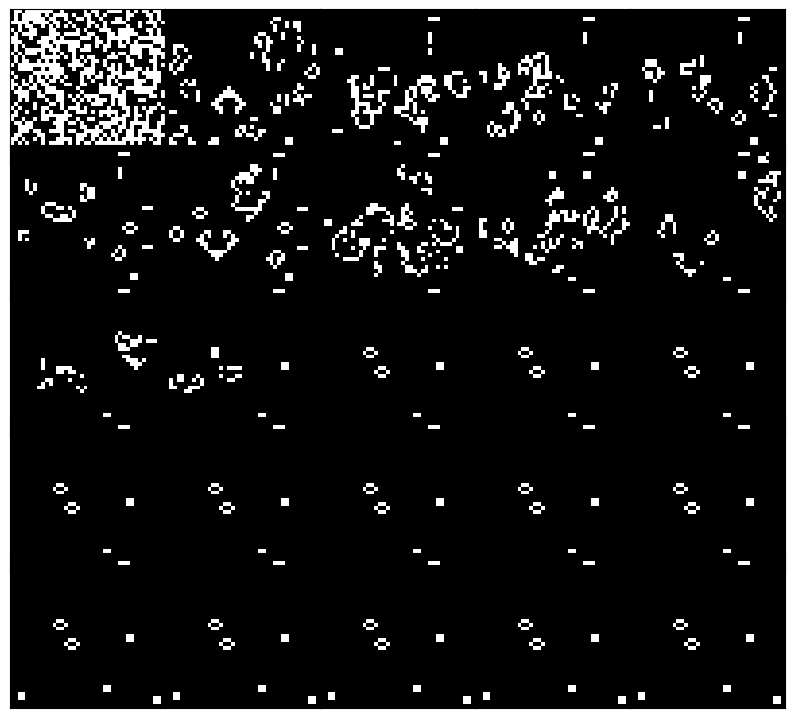
Because our base class included a history attribute and a storage utility in the simulate method, we can also access the full time series of automaton states, which our base class stores in a list. We can use this to make animations, and to analyze the behavior of the automaton over time.
plt.figure(figsize=(10, 10))
### plot 25 equally spaced frames from the history
frames = model.history[::len(model.history) // 25][:-1]
for i, frame in enumerate(frames):
plt.subplot(5, 5, i+1)
plt.imshow(frame, cmap="gray")
plt.xticks([]); plt.yticks([])
## minimize spacing between frames
plt.subplots_adjust(wspace=0, hspace=-0.4)
from matplotlib.animation import FuncAnimation
from IPython.display import HTML
# Assuming frames is a numpy array with shape (num_frames, height, width)
frames = np.array(model.history).copy()
fig = plt.figure(figsize=(6, 6))
img = plt.imshow(frames[0], vmin=0, vmax=1, cmap="gray");
plt.xticks([]); plt.yticks([])
# tight margins
plt.margins(0,0)
plt.gca().xaxis.set_major_locator(plt.NullLocator())
def update(frame):
img.set_array(frame)
ani = FuncAnimation(fig, update, frames=frames, interval=50)
HTML(ani.to_jshtml())
How long did that take?¶
We can now estimate the expected runtime of our Game of Life simulation by estimating the number of operations required to update the entire lattice. We first need to define a measure of the problem size. In our case, we will set equal to the total number of cells in the lattice. So, for a lattice, . We choose this convention because the lattice could be non-square, or we may want to consider a 3D lattice, and so we need a consistent measure of the size that is invariant to the dimensionality of the lattice.
Memory Scaling¶
When simulating the Game of Life, we need to store the entire lattice in memory, requiring at least values. For synchronous update rules, each site value at timestep depends on the lattice . That means that each timestep requires a full copy of the entire universe, into which we write the next states one-by-one. Our implemention therefore writes new values of the lattice to a new array, which requires another values to be stored in memory. So, the total memory required is . Some array operations can be performed in-place using pass-by-reference tricks like pointers, in order to avoid this copying step, but our minimal implementation does not do this. So if our original lattice required 1 MP of memory, then we need to set aside 2 MP of memory to compute the next state. So-called “Big-O” notation usually ignores prefactors, and so we would say that the asymptotic space requirements to simulate the Game of Life are .
Runtime scaling¶
To assess the number of operations, or time complexity, of our algorithm, we need to look at what our algorithm does carefully. Since we update each lattice site once per iteration, we know that the complexity is at least . The two outer loops therefore produce this cost. To compute the time complexity of the neighbor counting step, we need to poll the eight nearest neighbors of each site, requiring at least 9 operations to account for removing each site’s own value from the sum. Implementing the Game of Life update rule requires a comparison of this sum against a set of cases followed by an update, which we will count as 1 operation per site. So each neighbor counting update takes about 10 operations. For a more general cellular automaton that updates based on further neighbors (like next-nearest neighbors), this cost would increase.
We estimate that the overall runtime scales as . However, since we can treat it as a prefactor, and say that the runtime remains . However, this is not always the case. If we had a global cellular automaton, like an N-body simulation, then each site’s update might require computing pairwise forces between that site and all other sites.In this limit because we have to check every other site every time we update a single site. So a cellular automaton with global interactions would have runtime
When implementing the Game of Life, the linear cost of both memory and runtime are due to the fact that we need to update every site. And so we suspect that we cannot improve the asymptotic scaling of the algorithm. However, low-level optimizations (vectorizations, convolution, etc) could stil decrease the runtime by reducing the prefactor. The Big-O scaling is thus an intrinsic mathematical property of an algorithm, and not a property of the hardware or software used to implement them.
Can we improve our implementation?¶
A key idea of cellular automata is locality: the update of each site depends only on the state of its neighbors. The Game of Life uses a Moore neighborhood, in which the first nearest neighbors (including diagonals) are considered. The Game of Life update rule can therefore be seen as first implementing convolution of the grid state with a kernel of the form
This discrete convolution essentially takes the sum of the neighbors, and uses this sum plus the state of the center cell in order to decide what to do. This makes the Game of Life an example of an outer totalistic cellular automaton. Recall that a two-dimensional discrete convolution has the form
However, when the kernel has compact support (as in our nearest-neighborhood update rule), this double summation simplifies,
For our Game of Life example, . The periodic boundary conditions can be implemented by padding each dimension of with values from the other side of the array, and then cropping the convolution result to the original size of . We can estimate the number of multiplications required to perform a discrete convolution by counting the number of elements in the kernel, , and the number of elements in the grid, , for an overall time complexity of .
counting_kernel = np.ones((3, 3))
counting_kernel[1, 1] = 0
plt.figure(figsize=(3, 3))
plt.imshow(counting_kernel, cmap="gray")
plt.xticks([]); plt.yticks([])([], [])
import requests
import numpy as np
import io
url = "https://raw.githubusercontent.com/williamgilpin/cphy/main/resources/hank.npz"
response = requests.get(url)
response.raise_for_status() # Ensure we notice bad responses
image = np.load(io.BytesIO(response.content), allow_pickle=True)
## Convert to binary (0 and 1)
image_bw = (image < 0.5).astype(float)
plt.figure()
plt.imshow(image_bw, cmap="gray")
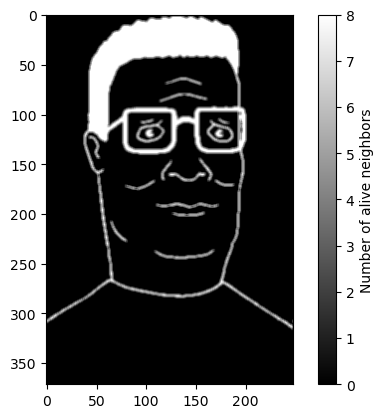
from scipy.signal import convolve2d
image_counts = convolve2d(image_bw, counting_kernel, mode='same', boundary='wrap')
plt.figure()
plt.imshow(image_counts, cmap="gray")
plt.colorbar(label="Number of alive neighbors")
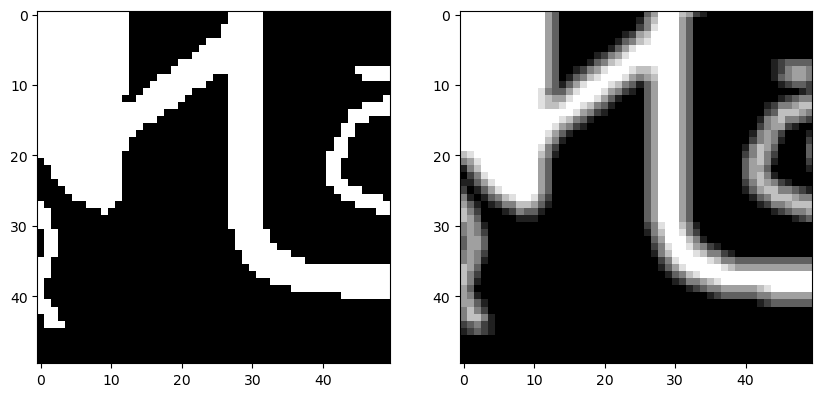
plt.figure(figsize=(10, 5))
plt.subplot(1, 2, 1)
plt.imshow(image_bw[100:150, 50:100], cmap="gray")
plt.subplot(1, 2, 2)
plt.imshow(image_counts[100:150, 50:100], cmap="gray")
from scipy.signal import convolve2d
class GameOfLife(CellularAutomaton):
def __init__(self, n, **kwargs):
# the super method calls the parent class's __init__ method
# and passes the arguments to it. It is a constructor
super().__init__(n, 2, **kwargs)
def next_state(self):
"""
Compute the next state of the lattice using discrete convolutions to implement
the rules of the Game of Life.
"""
# Compute the next state
next_state = np.zeros_like(self.state)
# Compute the number of neighbors for each cell
totalistic_kernel = np.ones((3, 3))
totalistic_kernel[1, 1] = 0 # don't count the center cell itself
# convolve with periodic boundary conditions
n_neighbors = convolve2d(self.state, totalistic_kernel, mode='same', boundary='wrap')
# implement the rules of the Game of Life in a vectorized way
next_state = np.logical_or(
np.logical_and(self.state == 1, n_neighbors == 2),
n_neighbors == 3
)
return next_state
model = GameOfLife(40, random_state=0)
model.simulate(200)
print("Average time per iteration: ", end="")
%timeit model.next_state()
plt.figure(figsize=(10, 5))
plt.subplot(1, 2, 1)
plt.imshow(model.initial_state, cmap="gray")
plt.subplot(1, 2, 2)
plt.imshow(model.state, cmap="gray")Average time per iteration: 25.4 μs ± 168 ns per loop (mean ± std. dev. of 7 runs, 10,000 loops each)
# model = GameOfLife(40, random_state=0, initial_state=image_bw.astype(int))
# model.simulate(400)
plt.figure(figsize=(10, 8))
plt.subplot(1, 2, 1)
plt.imshow(model.initial_state, cmap="gray")
plt.subplot(1, 2, 2)
plt.imshow(model.state, cmap="gray")
## horizontal spacing
plt.subplots_adjust(wspace=0, hspace=-10)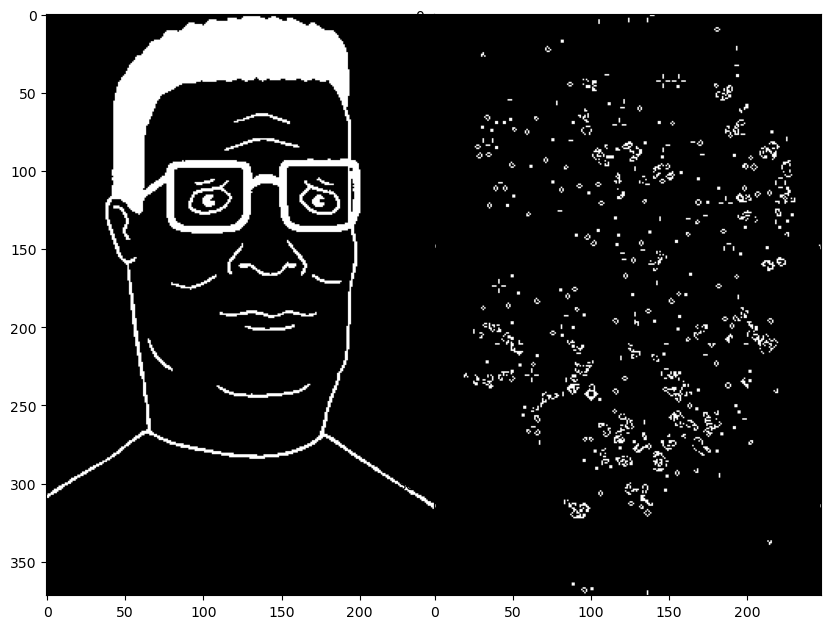
from matplotlib.animation import FuncAnimation
from IPython.display import HTML
# Assuming frames is a numpy array with shape (num_frames, height, width)
frames = np.array(model.history).copy()
fig = plt.figure(figsize=(6, 6))
img = plt.imshow(frames[0], vmin=0, vmax=1, cmap="gray");
plt.xticks([]); plt.yticks([])
# tight margins
plt.margins(0,0)
plt.gca().xaxis.set_major_locator(plt.NullLocator())
def update(frame):
img.set_array(frame)
ani = FuncAnimation(fig, update, frames=frames, interval=50)
HTML(ani.to_jshtml())Animation size has reached 20990568 bytes, exceeding the limit of 20971520.0. If you're sure you want a larger animation embedded, set the animation.embed_limit rc parameter to a larger value (in MB). This and further frames will be dropped.
Can we go even faster?¶
Based on the discrete convolution equation, we estimate that the runtime of a single update step is proportional to both the Moore neighborhood size and the total size of the grid, . Because the update rule is local, however, and so the runtime is dominated by the factor .
It turns out that we can speed up the convolution operation slightly by performing it in frequency space. Recall the equivalence between convolution and multiplication in the Fourier domain:
where is the Fourier transform operator. This means that we can compute the convolution of two functions by multiplying their Fourier transforms and then taking the inverse Fourier transform of the result. Since the product is taken elementwise over the transformed array and kernel, we expect the product to require multiplication operations, but we gain the cost of performing and inverting the Fourier transform. The Fourier Transform integral in two dimensions has the form
where and are the spatial frequencies in the and directions, respectively. This integral takes operations to compute, but it turns out that we can compute the Fourier transform in operations using the Fast Fourier Transform algorithm.
While the asymptotic (and thus intrinsic) complexities are the same for convolutions in real and frequency space, the Fourier approach often has smaller prefactors and enables parallelization. In fact, many 2D convolution functions in modern languages use the FFT under the hood to speed up the computation.
Extending the Game of Life to a continuous domain¶
We saw that the update rule for the game of life is a function of the number of neighbors of a cell. We can replace the discrete neighbor kernel with a continuous one. This idea is extended and refined in Lenia, a fully continuous-time and continuous-space cellular automaton that exhibits surprisingly complex, life-like behavior. The following code is a highly-simplified version of Lenia.
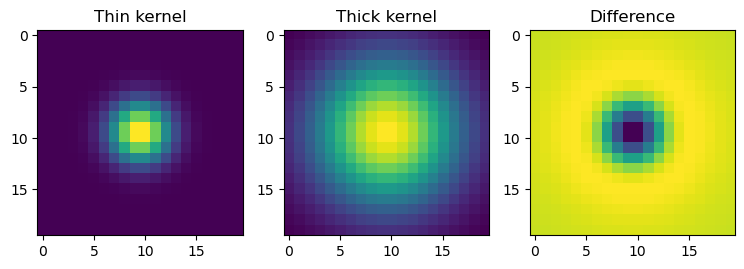
Our neighbor counting kernel essentially consists of convolving the entire lattice with a square kernel. We can replace this “hard” kernel with a donut-shaped kernel, which will add up the counts of neighbors within a certain radius of the center cell.
# We can use type hints to indicate the types of the arguments and return values
# of functions. This is not enforced by Python, but it can be useful for
# documentation and for static type checkers like mypy or numba
def gaussian_kernel(size: int, sigma: float):
"""
Make a gaussian kernel of given size and standard deviation.
Args:
size (int): the size of the kernel
sigma (float): the standard deviation of the gaussian
Returns:
ndarray: the gaussian kernel
"""
kernel = np.fromfunction(
lambda x, y: (1/ (2 * np.pi * sigma**2)) *
np.exp(- ((x - (size - 1) / 2) ** 2 + (y - (size - 1) / 2) ** 2) / (2 * sigma**2)),
(size, size)
)
return kernel / np.sum(kernel)
kernel1 = gaussian_kernel(20, 2)
kernel2 = gaussian_kernel(20, 5)
plt.figure(figsize=(9, 3))
plt.subplot(1, 3, 1)
plt.imshow(kernel1, cmap="viridis")
plt.title("Thin kernel")
plt.subplot(1, 3, 2)
plt.imshow(kernel2, cmap="viridis")
plt.title("Thick kernel")
plt.subplot(1, 3, 3)
plt.imshow(kernel2 - kernel1, cmap="viridis")
plt.title("Difference")
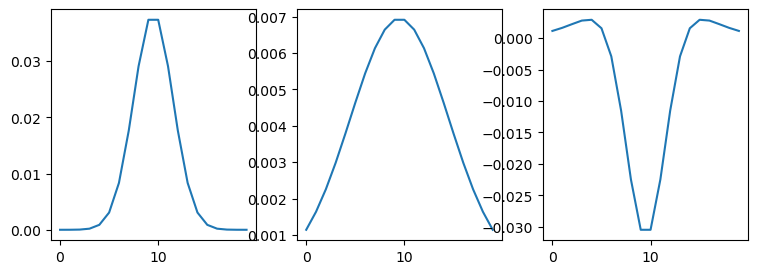
plt.figure(figsize=(9, 3))
plt.subplot(1, 3, 1)
plt.plot(kernel1[10, :])
plt.subplot(1, 3, 2)
plt.plot(kernel2[10, :])
plt.subplot(1, 3, 3)
plt.plot((kernel2 - kernel1)[10, :])
How do we count states? After performing the neighbor counting convolution, we can take each pixel’s “count” value, which is now a continuous value, and we can apply smoother version of the Game of Life threshold logitc to it to determine the output state of the pixel. We will use a 1d Gaussian function:
where is the count value at a given pixel. The parameter sets the target threshold---the output state will be largest if the pixel is closer to . For example, if we want the output response to be maximized when the neighbor count is 3, we set . The parameter sets the width of the Gaussian, and determines how quickly the output state falls off as the count value moves away from . A count much less than corresponds to undercrowding, and a count much greater than corresponds to overcrowding.
We expect that setting will give us a sharp transition between counts that differ by 1, just like the discrete Game of Life responds very differently to 2 and 3 neighbors.
# from scipy.stats import multivariate_normal
from scipy.signal import convolve2d
def gaussian1d(x, mu, sigma):
return np.exp(-(x - mu)**2/(2 * sigma**2))/(sigma * np.sqrt(2 * np.pi))
class SmoothGameOfLife(CellularAutomaton):
"""
A class for the Game of Life on a continuous-valued lattice, based on the
Lenia model.
Parameters:
n (int): the size of the lattice
r (float): the standard deviation of the gaussian kernel
References:
Lenia: Lenia: Biology of Artificial Life by Bert Wang-Chak Chan
https://doi.org/10.25088/ComplexSystems.28.3.251
Lenia tutorial:
https://colab.research.google.com/github/OpenLenia/Lenia-Tutorial/blob/main/Tutorial_From_Conway_to_Lenia.ipynb
"""
def __init__(self, n, r=1, **kwargs):
# the super method calls the parent class's __init__ method
# and passes the arguments to it. It is a constructor
super().__init__(n, 2, **kwargs)
self.r = r
def next_state(self):
"""
Compute the next state of the lattice using discrete convolutions to implement
the rules of the Game of Life.
"""
# Compute the next state
next_state = np.zeros_like(self.state)
# Make a gaussian convolutional kernel of 10 x 10 size
# with standard deviation 1
neighbors_kernel = gaussian_kernel(20, self.r)
neighbors_kernel /= np.max(neighbors_kernel)
self_kernel = gaussian_kernel(20, 2)
self_kernel /= np.max(self_kernel)
totalistic_kernel = neighbors_kernel - self_kernel
totalistic_kernel /= np.sum(totalistic_kernel)
# convolve with periodic boundary conditions
n_neighbors = convolve2d(self.state, totalistic_kernel, mode='same', boundary='wrap')
# Apply a nonlinearity elementwise to the neighbor count. This operates in a
# pixelwise fashion, so we can vectorize it
n_neighbors3 = gaussian1d(n_neighbors, 3, 0.5) # 3ish neighbors
n_neighbors3 /= np.max(n_neighbors3) # normalize
n_neighbors2 = gaussian1d(n_neighbors, 2, 0.4) # 2ish neighbors
n_neighbors2 /= np.max(n_neighbors2) # normalize
next_state = gaussian1d(self.state * n_neighbors2 + n_neighbors3, 1, 0.9)
# next_state = gaussian1d(self.state * n_neighbors2 + n_neighbors3, 1, 1.1)
next_state /= np.max(next_state)
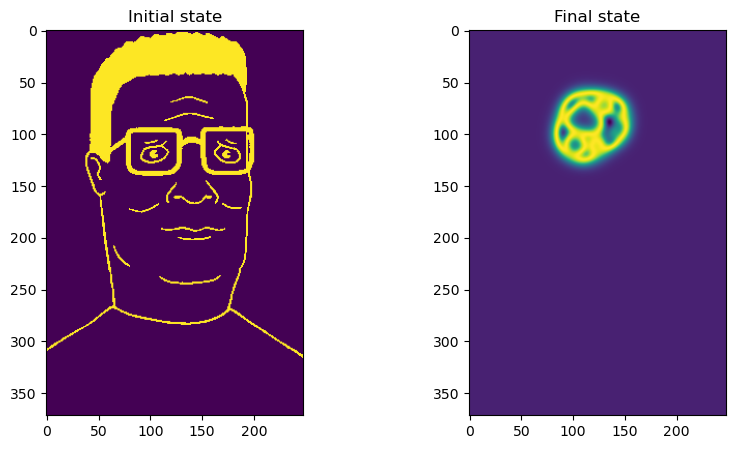
return next_state# model = SmoothGameOfLife(200, 5, random_state=0)
model = SmoothGameOfLife(200, 5, initial_state=image_bw.astype(float))
model.simulate(100)
print("Average time per iteration: ", end="")
%timeit model.next_state()
plt.figure(figsize=(10, 5))
plt.subplot(1, 2, 1)
plt.imshow(model.initial_state, cmap="viridis")
plt.title("Initial state")
plt.subplot(1, 2, 2)
plt.imshow(model.state, cmap="viridis")
plt.title("Final state")Average time per iteration: 39 ms ± 472 μs per loop (mean ± std. dev. of 7 runs, 10 loops each)
from matplotlib.animation import FuncAnimation
from IPython.display import HTML
# Assuming frames is a numpy array with shape (num_frames, height, width)
frames = np.array(model.history).copy()
fig = plt.figure(figsize=(6, 6))
img = plt.imshow(frames[0], vmin=0, vmax=1, cmap="gray");
plt.xticks([]); plt.yticks([])
# tight margins
plt.margins(0,0)
plt.gca().xaxis.set_major_locator(plt.NullLocator())
def update(frame):
img.set_array(frame)
ani = FuncAnimation(fig, update, frames=frames, interval=50)
HTML(ani.to_jshtml())
Cellular automata as physical systems¶
Cellular automata represent an intriguing example of a physical system where surprising complexity can emerge from relatively simple rules. As a result, they have a rich history in the physics literature, although their usage has limitations due to a lack of analytical tools for working with their governing equations. Since all fields are discrete, we cannot use stability analysis or other common theoretical tools from physics to understand their behavior. One well-studied phenomenon in CA is the general classes of rules that produce rich behaviors like the Game of Life. For example, rules that send all cells to one or zero both produce trivial dynamics, and, extending this intuition, it turns out that rules that send roughly even numbers of states to one or zero tend to produce richer dynamics.
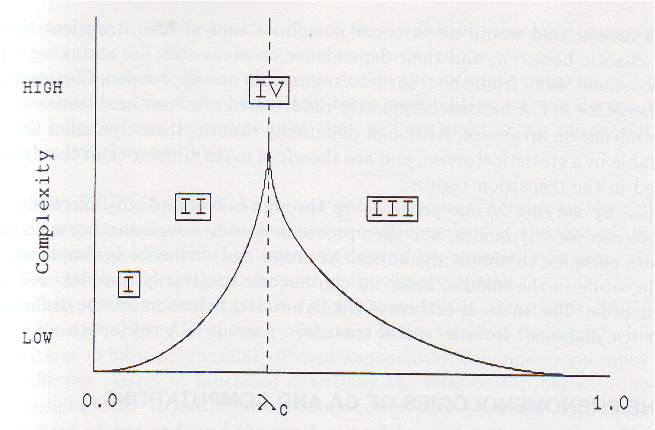
Complexity of CA dynamics vs the entropy of the rule table. Image from Langton, 1990
Few real-world physical systems readily map onto cellular automata, because the physical world is usually continuous and often non-local. Additionally, few real-world systems have a synchronous update rule: all of the cells update to a new state at the same time: the value of a cell depends on the “frozen” values and its neighbors at the same instant . Most real world systems instead require updates that are asynchronous: different cells can update at different times.
However, there a few systems that are approximately described by cellular automata. For example, the scale patterning of lizard skin is well described by a cellular automaton. The scales are separated by barriers that inhibit transport of signaling molecules that allowing neighboring scales to influence patterning, which effectively discretizes the spatial domain. Additionally, the timescale of the pattern evolving is extremely slow, and so synchronous update rules are approximately valid.
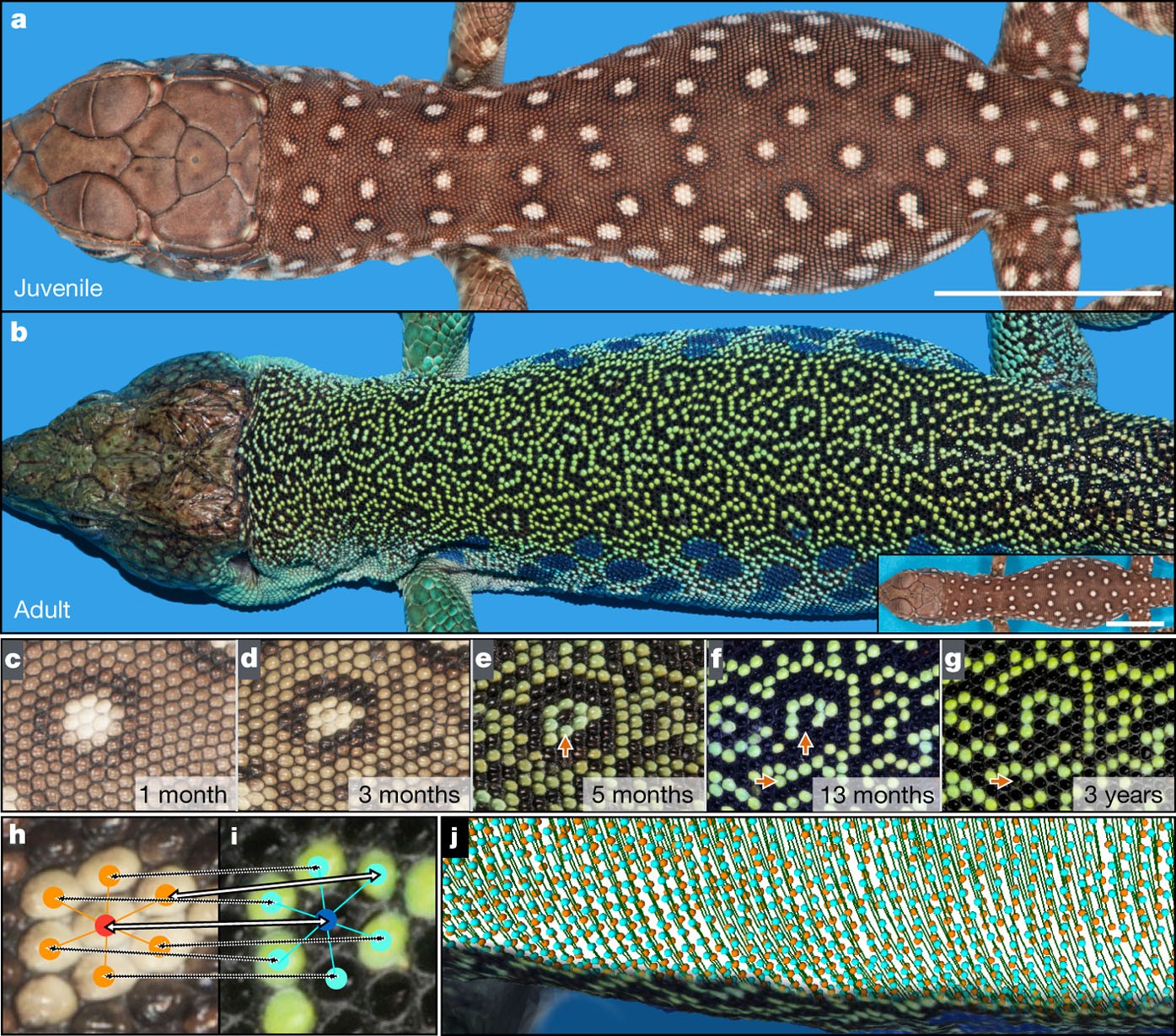
Scale patterning in lizards. Image from Manukyan et al. (2017)
- Rendell, P. (2015). Introduction. In Turing Machine Universality of the Game of Life (pp. 1–3). Springer International Publishing. 10.1007/978-3-319-19842-2_1
- Chan, B. W.-C. (2019). Lenia: Biology of Artificial Life. Complex Systems, 28(3), 251–286. 10.25088/complexsystems.28.3.251
- Langton, C. G. (1990). Computation at the edge of chaos: Phase transitions and emergent computation. Physica D: Nonlinear Phenomena, 42(1–3), 12–37. 10.1016/0167-2789(90)90064-v
- Manukyan, L., Montandon, S. A., Fofonjka, A., Smirnov, S., & Milinkovitch, M. C. (2017). A living mesoscopic cellular automaton made of skin scales. Nature, 544(7649), 173–179. 10.1038/nature22031