Evolving cellular automata with genetic algorithms¶
Preamble: Run the cells below to import the necessary Python packages
This notebook created by William Gilpin. Consult the course website for all content and GitHub repository for raw files and runnable online code.
import numpy as np
# Wipe all outputs from this notebook
from IPython.display import Image, clear_output, display
clear_output(True)
# Import local plotting functions and in-notebook display functions
import matplotlib.pyplot as plt
%matplotlib inline
# Add the course directory to the Python path
# import sys
# sys.path.append('../')
# # import cphy.plotting as cplot
Gradient-free optimization¶
We saw before that many optimization methods implicitly require the locally-computed gradient of the potential, either explicitly or a finite-difference approximation
However, in many contexts this gradient is not available or is too expensive to compute
Today, we will consider a case where the gradient is impossible to compute, because the underlying system is discrete
Genetic algorithms¶
We define a set of candidate solutions to a problem, called the population
We then iteratively select the best solutions from the population using a fitness function. The next generation will inherit properties these best solutions from the previous generation
We use the best solutions to create new "offspring" solutions using a combination of mutation and crossover. The former corresponds to a random change in the solution, while the latter corresponds to combining two solutions to create a new one.
The offspring solutions are then added to the population, and they usually replace the worst solutions
class GeneticAlgorithm:
"""
Base class for genetic algorithms
Parameters:
population_size (int): Number of individuals in the population
fitness_function (callable): Function that computes the fitness of an individual
mutation_rate (float): Probability of mutating an individual
crossover_rate (float): Probability of crossing over two individuals
fraction_elites (float): Fraction of the population that is copied to the next generation
random_state (int): Random seed
verbose (bool): If True, print progress information during evolution
store_history (bool): If True, store the fitness of the population at each
generation
"""
def __init__(self,
population_size, fitness_function, mutation_rate=0.1,
crossover_rate=0.5, fraction_elites=0.5,
random_state=None, verbose=False, store_history=True
):
self.population_size = population_size
self.fitness_function = fitness_function
self.mutation_rate = mutation_rate
self.crossover_rate = crossover_rate
self.fraction_elites = fraction_elites
self.random_state = random_state
np.random.seed(self.random_state)
self.verbose = verbose
self.store_history = store_history
if self.store_history:
self.history = list()
## Initialize internal variables
self.population = None
self.best_fitness = None
self.best_individual = None
def initialize(self):
"""Initialize a population of individuals"""
raise NotImplementedError("This method must be implemented by a subclass")
def step(self):
"""Perform a single update step of the entire population"""
raise NotImplementedError("This method must be implemented by a subclass")
def evolve(self, n_generations):
"""Evolve the population for a given number of generations"""
self.initialize()
for i in range(n_generations):
if self.verbose:
if i % (n_generations // 20) == 0:
print(f'Generation {i} of {n_generations}')
self.step()
return self.best_individual
To use genetic algorithms, we need to define a fitness function, which encodes the objective we want to optimize. Here, we will use a familiar low-dimensional fitness function that we saw in the context of gradient descent: the inverse Gaussian function.
def fitness(x):
"""A 2D fitness function corresponding to the sum of two Gaussian peaks"""
return np.exp(-((x[0] - 0.5)**2 + (x[1] - 0.5)**2) / 0.1**2) + \
np.exp(-((x[0] - 0.5)**2 + (x[1] - 0.75)**2) / 0.1**2)
xx, yy = np.meshgrid(np.linspace(0, 1, 100), np.linspace(0, 1, 100))
xx, yy = xx.ravel(), yy.ravel()
plt.figure(figsize=(6, 6))
plt.scatter(xx, yy, c=fitness([xx, yy]), s=10, cmap='viridis')
plt.axis('off')
(-0.05, 1.05, -0.05, 1.05)

class EvolveLandscape(GeneticAlgorithm):
def __init__(self, *args, **kwargs):
super().__init__(*args, **kwargs)
self.population = np.random.rand(self.population_size, 2)
def initialize(self):
"""Initialize a population of individuals"""
self.best_fitness = np.zeros(self.population_size)
self.best_individual = np.zeros(2)
def step(self):
"""Perform a single update step of the entire population"""
# Evaluate the fitness of each individual
for i in range(self.population_size):
self.best_fitness[i] = self.fitness_function(self.population[i])
# Find the best individual
self.best_individual = self.population[np.argmax(self.best_fitness)]
# Store the best fitness
if self.store_history:
self.history.append(self.best_fitness.copy())
# Create a new population
new_population = np.zeros_like(self.population)
# Copy the best individuals
n_elites = int(self.fraction_elites * self.population_size)
new_population[:n_elites] = self.population[np.argsort(self.best_fitness)][-n_elites:]
# Fill the rest of the population by crossover
for i in range(n_elites, self.population_size, 2):
# Select two individuals from the current population
parents = self.population[np.random.choice(self.population_size, 2, replace=False)]
# Perform crossover
new_population[i] = parents[0] * (1 - self.crossover_rate) + parents[1] * self.crossover_rate
new_population[i + 1] = parents[1] * (1 - self.crossover_rate) + parents[0] * self.crossover_rate
# Mutate the new individuals
if np.random.rand() < self.mutation_rate:
new_population[i] += np.random.randn(2) * 0.1
if np.random.rand() < self.mutation_rate:
new_population[i + 1] += np.random.randn(2) * 0.1
# Replace the old population with the new one
self.population = new_population
# Create an instance of the genetic algorithm
ga = EvolveLandscape(
population_size=100, fitness_function=fitness, mutation_rate=0.1,
crossover_rate=0.5, fraction_elites=0.5, random_state=0, verbose=True
)
plt.figure(figsize=(6, 6))
plt.scatter(xx, yy, c=fitness([xx, yy]), s=10, cmap='viridis')
plt.scatter(ga.population[:, 0], ga.population[:, 1], c='r', s=10)
plt.title("Initial Population Positions")
plt.axis('off')
# Evolve the population for 100 generations
ga.evolve(100)
plt.figure(figsize=(6, 6))
plt.scatter(xx, yy, c=fitness([xx, yy]), s=10, cmap='viridis')
plt.scatter(ga.best_individual[0], ga.best_individual[1], c='r', s=100, marker='*')
plt.scatter(ga.population[:, 0], ga.population[:, 1], c='r', s=10)
plt.title("Final Population Positions")
plt.axis('off')
# Plot the fitness of the population over time
plt.figure()
plt.plot(np.min(ga.history, axis=1), label="Min Fitness")
plt.plot(np.mean(ga.history, axis=1), label="Mean Fitness")
plt.plot(np.max(ga.history, axis=1), label="Max Fitness")
plt.legend()
plt.xlabel("Generation")
plt.ylabel("Fitness")
Generation 0 of 100 Generation 5 of 100 Generation 10 of 100 Generation 15 of 100 Generation 20 of 100 Generation 25 of 100 Generation 30 of 100 Generation 35 of 100 Generation 40 of 100 Generation 45 of 100 Generation 50 of 100 Generation 55 of 100 Generation 60 of 100 Generation 65 of 100 Generation 70 of 100 Generation 75 of 100 Generation 80 of 100 Generation 85 of 100 Generation 90 of 100 Generation 95 of 100
Text(0, 0.5, 'Fitness')



Evolving cellular automata¶
Cellular automata take discrete values, and update on a discrete grid in discrete time steps
This discrete nature precludes the use of gradient-based methods when analyzing their behavior
Influential results that exploring the space of CA with genetic algorithms can be found in Mitchell et al. 1993 and Crutchfield & Mitchell 1995
We start by defining our base class for cellular automata, which should look familiar from the previous notebook.
class CellularAutomaton:
"""
A base class for cellular automata. Subclasses must implement the step method.
Parameters
n (int): The number of cells in the system
n_states (int): The number of states in the system
random_state (None or int): The seed for the random number generator. If None,
the random number generator is not seeded.
initial_state (None or array): The initial state of the system. If None, a
random initial state is used.
"""
def __init__(self, n, n_states, random_state=None, initial_state=None):
self.n_states = n_states
self.n = n
self.random_state = random_state
np.random.seed(random_state)
## The universe is a 2D array of integers
if initial_state is None:
self.initial_state = np.random.choice(self.n_states, size=(self.n, self.n))
else:
self.initial_state = initial_state
self.state = self.initial_state
self.history = [self.state]
def next_state(self):
"""
Output the next state of the entire board
"""
return NotImplementedError
def simulate(self, n_steps):
"""
Iterate the dynamics for n_steps, and return the results as an array
"""
for i in range(n_steps):
self.state = self.next_state()
self.history.append(self.state.copy())
return self.state
We want to represent the space of rules, which are discrete-valued functions that take in a neighborhood of cells and return a new value for the center cell
We consider only binary cellular automata like Conway's Game of Life, for which a given cell can be either "alive" (1) or "dead" (0)
For a Moore neighborhood CA (nearest neighbors including diagonal), there are $2^9 = 512$ possible input values if we include the center cell
For each input value, there are two possible output values. Therefore, there are $2^{2^9} \approx 10^{154}$ possible rules.
We therefore define a subclass, ProgrammaticCA, which takes a ruleset in its constructor and defines the corresponding CA. We saw previously that many common CA may be quickly implemented using 2D convolutions with an appropriate kernel. For our implementation, we define a special convolutional kernel that converts a 3x3 neighborhood into a unique integer between 0 and 511. We then use this integer to index into the ruleset to determine the output value.
from scipy.signal import convolve2d
class ProgrammaticCA(CellularAutomaton):
def __init__(self, n, ruleset, **kwargs):
k = np.unique(ruleset).size
super().__init__(n, k, **kwargs)
self.ruleset = ruleset
## A special convolutional kernel for converting a binary neighborhood
## to an integer
self.powers = np.reshape(2 ** np.arange(9), (3, 3))
def next_state(self):
# Compute the next state
next_state = np.zeros_like(self.state)
# convolve with periodic boundary conditions
rule_indices = convolve2d(self.state, self.powers, mode='same', boundary='wrap')
## look up the rule for each cell
next_state = self.ruleset[rule_indices.astype(int)]
return next_state
# An entire CA can be represented as a single binary integer or hexidecimal code
random_ruleset = np.random.choice(2, size=2**9)
model = ProgrammaticCA(100, random_ruleset, random_state=0)
model.simulate(500)
plt.figure()
plt.imshow(model.initial_state, cmap="gray")
plt.title("Initial state")
plt.figure()
plt.imshow(model.state, cmap="gray")
plt.title("Final state")
Text(0.5, 1.0, 'Final state')


Searching the space of cellular automata with genetic algorithms¶
We are now ready to define a genetic algorithm that searches the space of cellular automata for interesting behavior.
Our fitness function will encode the desired properties of a learned automaton.
A simple choice is the variance of the number of live vs dead cells, in order to encourage discovery of CA that produce long-lived structures.
We've made some modifications to encourage activity, but you can try changing the fitness function to see what happens.
def fitness(trajectory):
"""
A fitness function that rewards activity (mixtures of on and off cells)
Args:
trajectory (array): A 2D array of integers representing the state of the CA at
each time step of the simulation. Shape is (n_steps, nx, ny)
Returns:
float: A fitness score
"""
final_state = trajectory[-1]
timechange = np.sum(np.abs(np.diff(np.array(trajectory), axis=0)))
timechange /= final_state.size
return np.max(final_state) - np.min(final_state) - np.std(final_state) + timechange
Our genetic algorithm will contain the following steps:
The
initializemethod initializes a population of individuals, which are represented by binary strings describing their rulesetsThe
stepmethod loops over each individual in the population and creates a CA with its ruleset. It then runs the CA for a fixed number of time steps and computes the fitness from the trajectory. The fitness is then stored in thefitnessesarray. Selection is then performed using elitism, crossover, and mutation.
All other methods are deferred to the base class.
class EvolveCA(GeneticAlgorithm):
"""
A class for evolving cellular automata rulesets using a genetic algorithm
Parameters
n_size (int): The size of the CA spatial lattice
n_steps (int): The number of CA steps to simulate per generation (the
trajectory length)
**kwargs: Keyword arguments to pass to the GeneticAlgorithm superclass
"""
def __init__(self, n_size, n_steps, **kwargs):
super().__init__(**kwargs)
self.n_size = n_size
self.n_steps = n_steps
def initialize(self):
self.population = np.random.choice(2, size=(self.population_size, 2**9))
def step(self):
"""Evolve one generation of the population"""
fitnesses = []
for ruleset in self.population:
model = ProgrammaticCA(self.n_size, ruleset, random_state=0)
model.simulate(self.n_steps)
fitness_val = self.fitness_function(model.history)
fitnesses.append(fitness_val)
fitnesses = np.array(fitnesses)
if self.store_history:
self.history.append(fitnesses)
## Sort population by fitness
self.population = self.population[np.argsort(fitnesses)]
## Create a new generation
n_elite = int(self.fraction_elites * self.population_size)
for i in range(self.population_size - n_elite):
## Crossover two high-performing rulesets
parent1_ind, parent2_ind = np.random.choice(
len(self.population[-n_elite:]), size=2, replace=True
)
parent1 = self.population[-n_elite:][-parent1_ind]
parent2 = self.population[-n_elite:][-parent2_ind]
crossover_point = np.random.randint(len(parent1))
# crossover_point = 0
child = np.hstack((parent1[:crossover_point], parent2[crossover_point:]))
## Mutate the child at random points
n_mutate = int(self.mutation_rate * len(child))
child[np.random.randint(2**9, size=n_mutate)] = np.random.randint(2, size=n_mutate)
self.population[i] = child
self.best_individual = self.population[-1]
self.best_fitness = np.max(fitnesses)
evolver = EvolveCA(40, 40, population_size=1000, fitness_function=fitness, random_state=0, verbose=True)
evolver.evolve(1000)
plt.figure()
plt.plot(np.min(evolver.history, axis=1), label="Min Fitness")
plt.plot(np.mean(evolver.history, axis=1), label="Mean Fitness")
plt.plot(np.max(evolver.history, axis=1), label="Max Fitness")
plt.legend()
plt.xlabel("Generation")
plt.ylabel("Fitness")
Generation 0 of 1000 Generation 50 of 1000 Generation 100 of 1000 Generation 150 of 1000 Generation 200 of 1000 Generation 250 of 1000 Generation 300 of 1000 Generation 350 of 1000 Generation 400 of 1000 Generation 450 of 1000 Generation 500 of 1000 Generation 550 of 1000 Generation 600 of 1000 Generation 650 of 1000 Generation 700 of 1000 Generation 750 of 1000 Generation 800 of 1000 Generation 850 of 1000 Generation 900 of 1000 Generation 950 of 1000
Text(0, 0.5, 'Fitness')

digit_5 = np.array([
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 1, 1, 1, 1, 0, 0, 0],
[0, 0, 0, 1, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 1, 1, 1, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 1, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 1, 0, 0, 0],
[0, 0, 0, 1, 1, 1, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0]
])
# digit_5 = np.logical_not(digit_5)
model = ProgrammaticCA(10, evolver.best_individual, random_state=0, initial_state=digit_5)
model.simulate(30)
plt.figure()
plt.imshow(model.initial_state, cmap="gray")
plt.axis("off")
plt.title("Initial state")
plt.figure()
plt.imshow(model.state, cmap="gray")
plt.axis("off")
plt.title("Final state")
Text(0.5, 1.0, 'Final state')


from matplotlib.animation import FuncAnimation
from IPython.display import HTML
# Assuming frames is a numpy array with shape (num_frames, height, width)
frames = np.array(model.history).copy()
fig = plt.figure(figsize=(6, 6))
img = plt.imshow(frames[0], vmin=0, vmax=1, cmap="gray");
plt.xticks([]); plt.yticks([])
# tight margins
plt.margins(0,0)
plt.gca().xaxis.set_major_locator(plt.NullLocator())
def update(frame):
img.set_array(frame)
ani = FuncAnimation(fig, update, frames=frames, interval=200)
HTML(ani.to_jshtml())

Outlook¶
Genetic algorithms can be found in many contexts where the "inverse" problem is difficult to solve. For example, they can be used to design meterials with desired properties, to optimize the design of mechanical structures like bridges, or even to perform hyperparameter optimization for machine learning models.
For example a recent study uses GA to design a metamaterial that exhibits nearly optimal optical absorption over a given wavelength range.
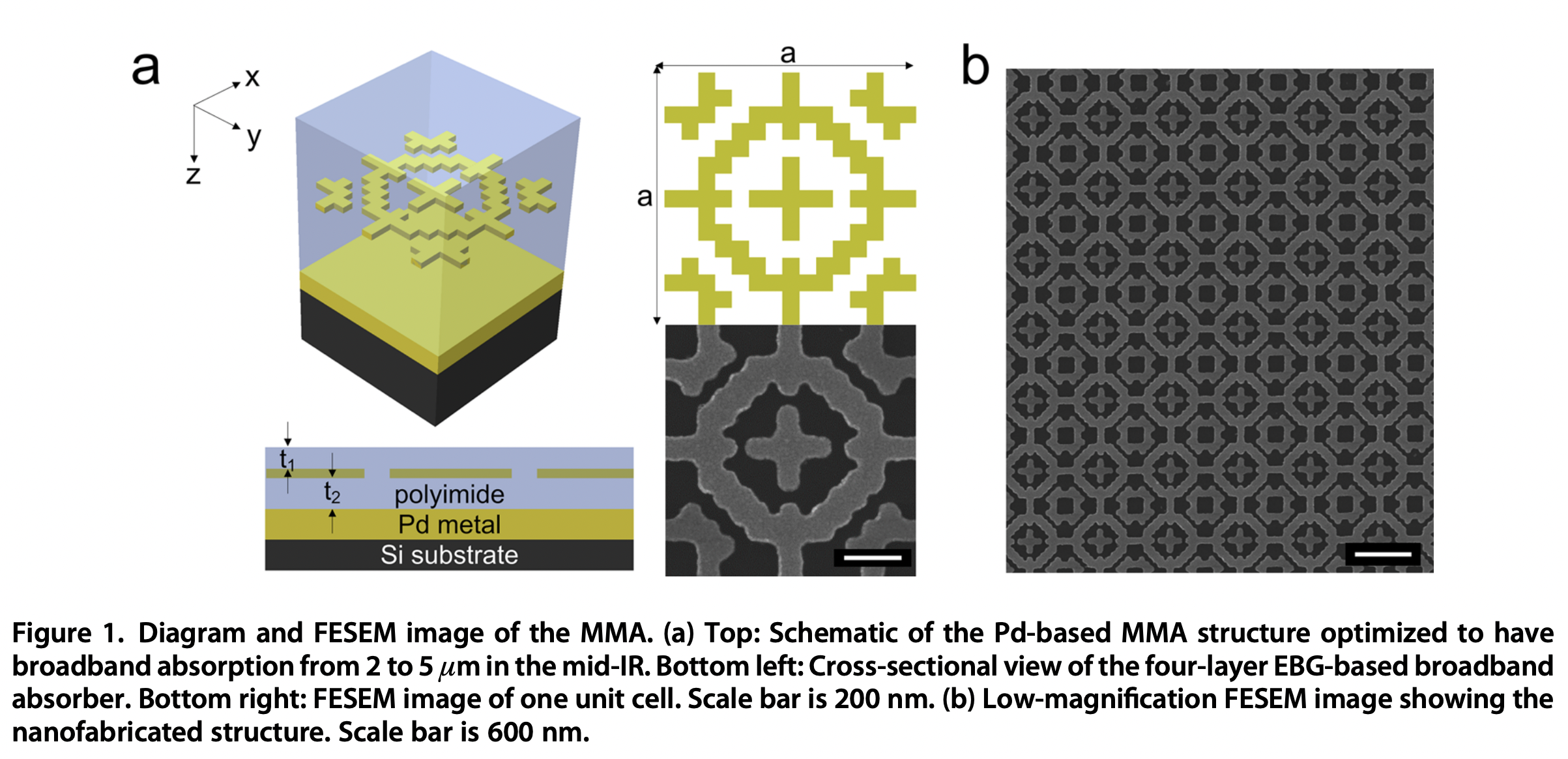
Image from Bossard et al. 2014
Appendix: Hyperparameters to modify¶
Single-rule crossovers
Fewer mutations